Manuscript — ASCE Journal of Computing in Civil Engineering
Road agencies need to know how bumpy a road is — not just a single score, but the shape of the surface along the route. Professional laser profilers do this well, but they are expensive and hard to deploy widely. This study asks: can everyday passenger cars, with a smartphone on board, estimate the road profile instead?
We developed PVRP (passenger-vehicle road profiling): drive a car on roads where the profile is already known, record how the vehicle moves with a smartphone, and use that pairing to train a model for that specific car. Once calibrated, the same car can survey new routes without manual hump tests or suspension measurements.
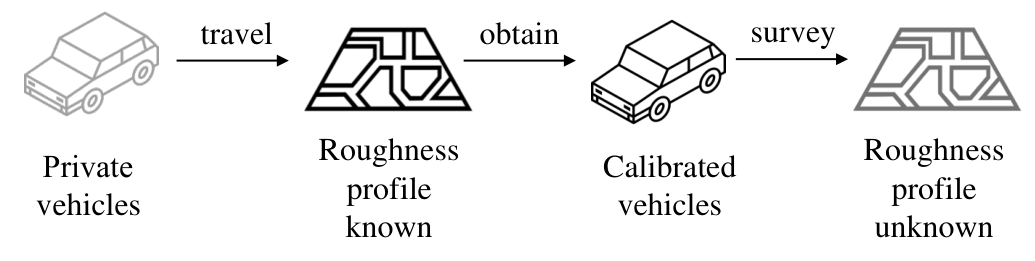
Overview of the passenger-vehicle profiling framework
The model reads short windows of vehicle motion and predicts the road height at each point. Training starts on simulated vehicle responses, then is fine-tuned on real drives. Four common vehicle types were tested — hatchback, sedan, SUV, and ute.
 |
 |
 |
 |
|---|---|---|---|
| Hatch | Sedan | SUV | Ute |
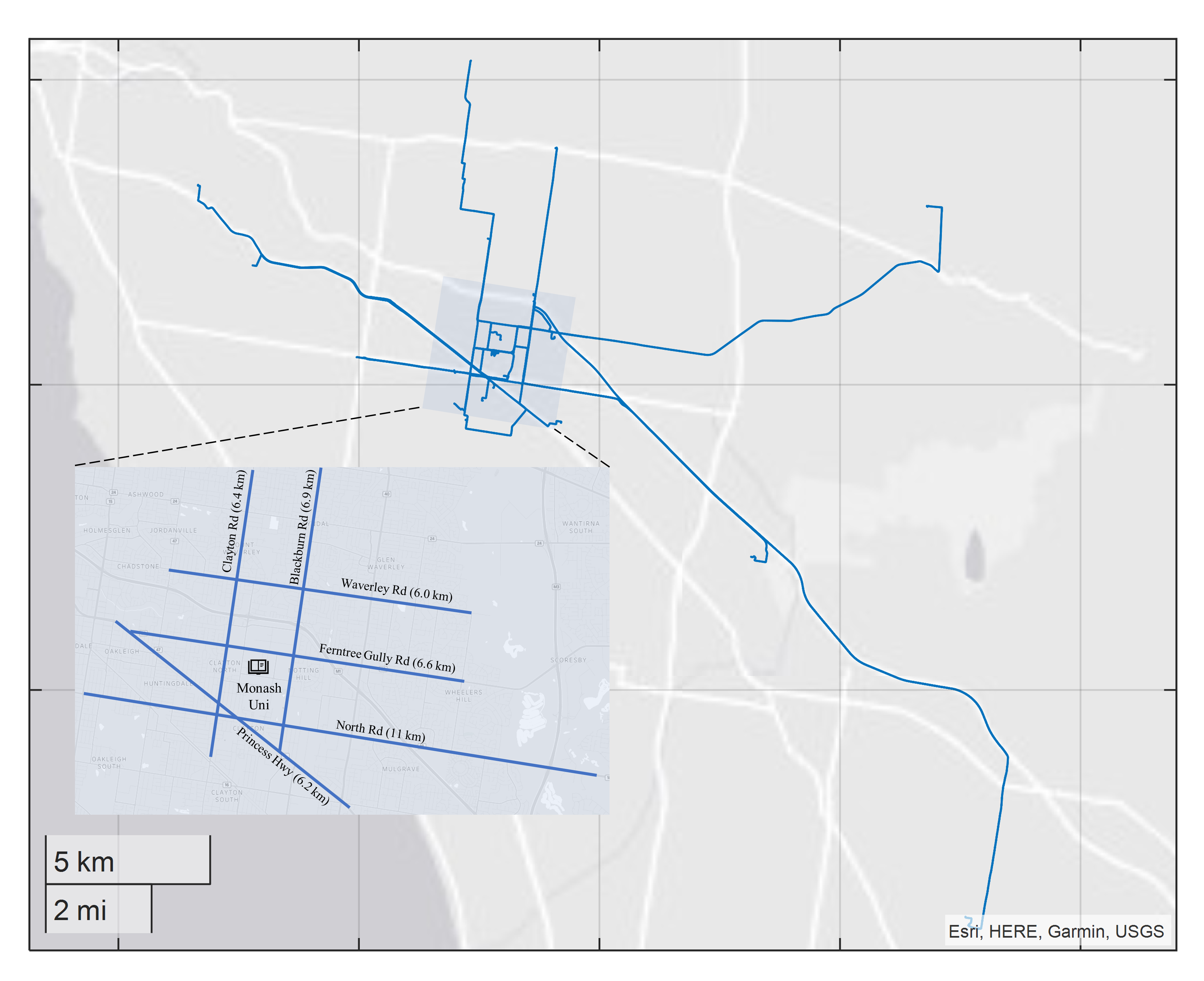
Field data were collected in Melbourne with a reference profiler and smartphone-equipped survey vehicles.
 |
 |
|---|---|
| Survey vehicle | Survey routes |
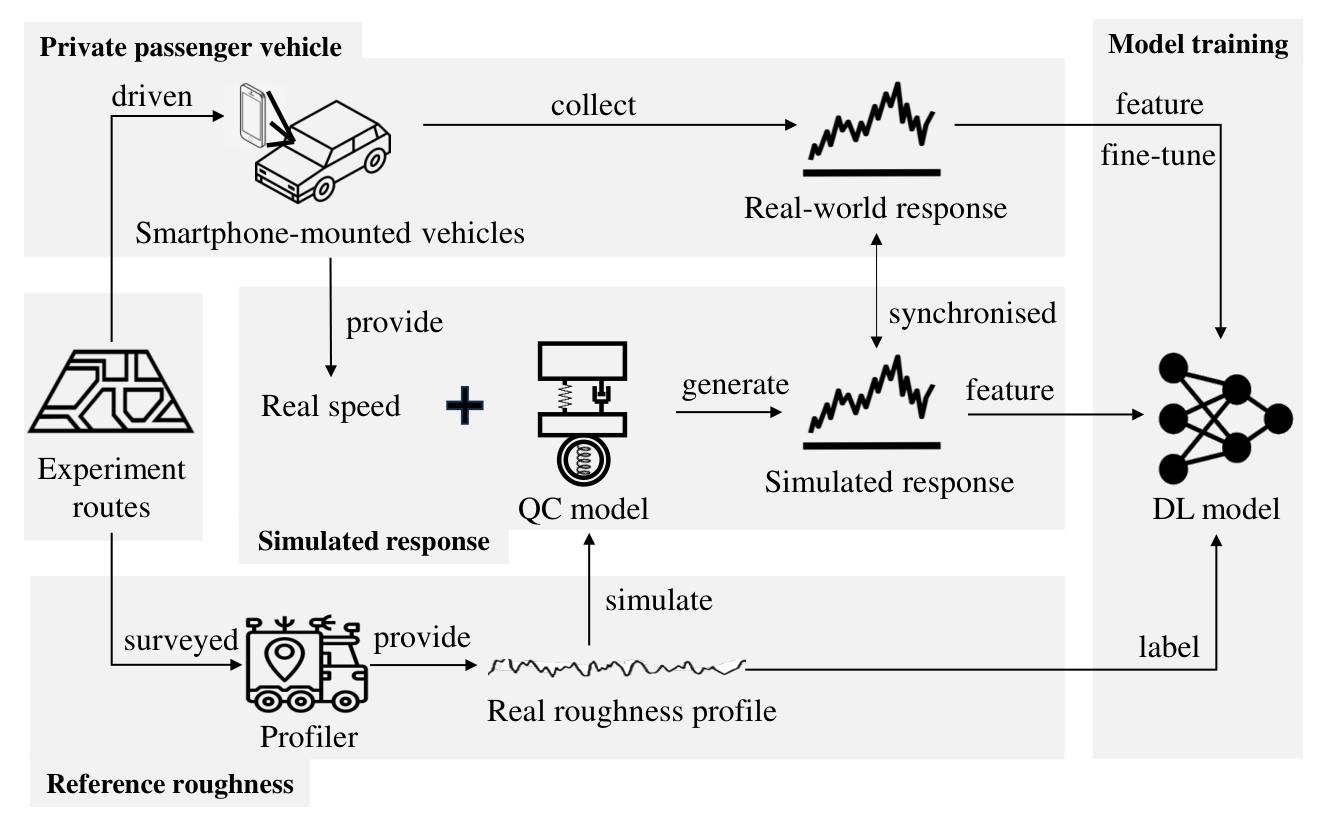
Research workflow — from labelled routes to profile estimation on new roads
What we found
- Estimated profiles followed the reference shape across all four vehicle types, with hatch and sedan showing the closest match.
- IRI (a standard roughness index) agreed with profiler measurements with R² of 0.58–0.65, comparable to or better than several existing smartphone apps.
- Roughness class (ISO 8608) matched the reference in about 90% of road segments.
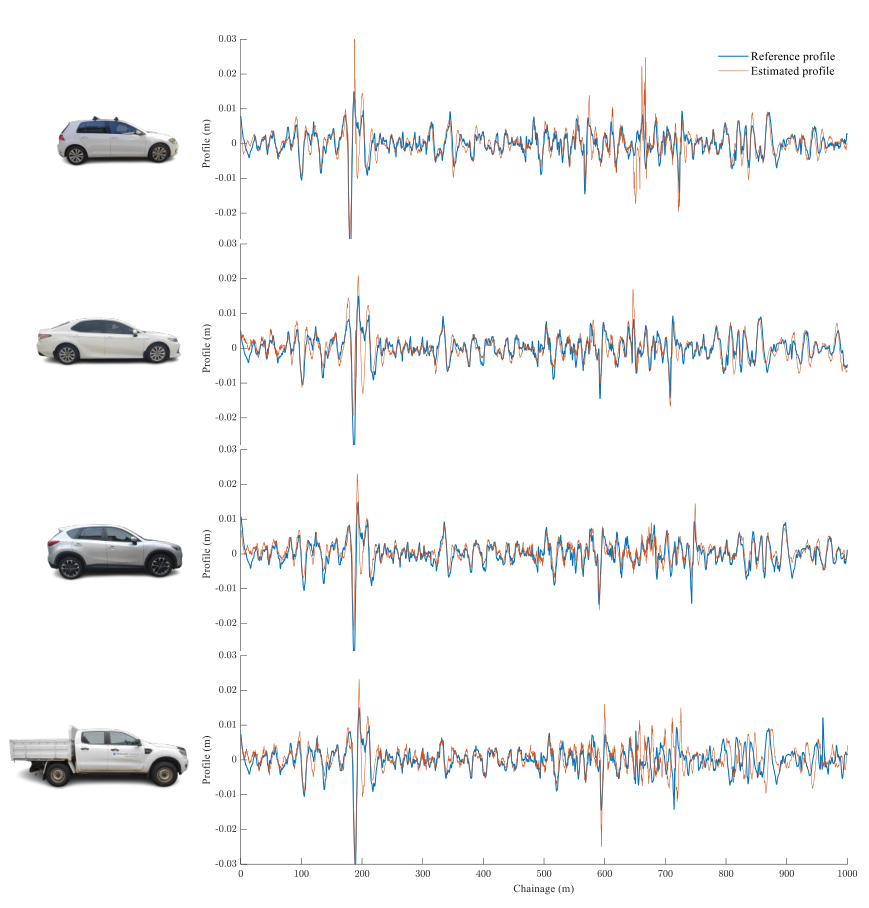
Estimated vs. reference profiles — four vehicle types
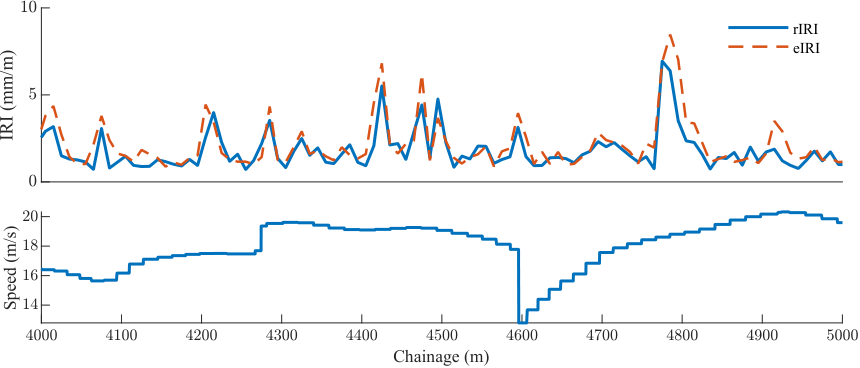
Estimated IRI along a test section
The main takeaway: profiling can move from specialist equipment toward ordinary vehicles and phones, opening the door to wider, more frequent road condition monitoring.
Authors: Qiqin Yu, Yihai Fang, Xiaowei Luo, Richard Wix